


News
2025.10.01
知財ニュース
テキサスA&M大学、月面を探査できる球体型ロボット「RoboBall」の開発を進行中―月面ミッションへ

テキサスA&M大学の工学科の大学院生らは、月面を探査できる球体型のロボット「RoboBall」の開発を行っている。
「RoboBall」は、球体型の探査機で、月の最も深いクレーターからビーチの凹凸のある砂地など車輪や脚を持つロボットでは到達できない場所にアクセスすることができる。従来のロボットは急激な方向転換で失速したり転倒したりするが、このロボットは、水から砂の上へ、向きを気にすることなく転がり出ることができ、他のロボットが行けない場所へ行くことができる。
「RoboBall」の開発はテキサスA&M大学のRobert Ambrose氏とその大学院生らによって開発が進められており、2003年に設計が開始されていたが一度保留となり、2021年に再度開発をスタートさせたのだという。

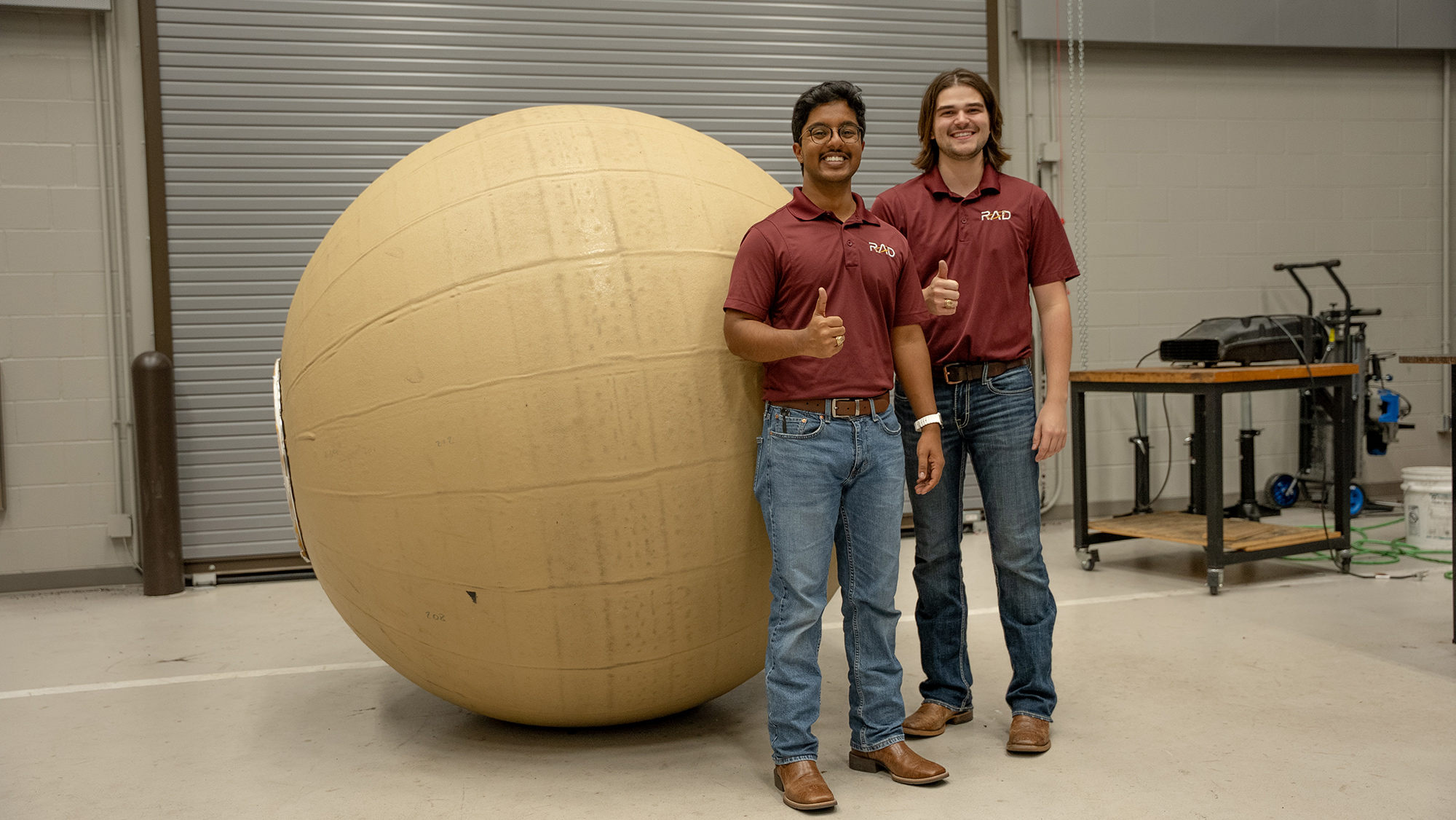
このロボットは、「エアバッグに入ったロボット」というシンプルなコンセプトで、2つのバージョンが並行して開発されている。第2世代の「RoboBall II」は、試験運用などが行われており、直径約61cm、最高時速は約32kmだ。もう1つのバージョン「RoboBall III」は、直径約182cm、センサー、カメラ、サンプリングツールなどのペイロードを搭載し、実際のミッションに使用できるように設計されている。
今後のテストでは、「RoboBall」を屋外環境に持ち込む予定とのこと。ガルベストンの海岸で水から陸への移動を実証し、実際の環境におけるロボットの浮力と地形適応性をテストするためのフィールドテストを計画している。
「RoboBall」の長期的な目標には、自律運転と遠隔操作の展開が含まれており、月着陸船から発射して急峻なクレーターの測量に使用したり、無人ドローンから打ち上げて災害後の被災地域の調査を行うことを目指している。また、地形の地図を作成し、データをオペレーターに送信し、さらにはアクセスが困難な場所に機器を展開することも可能だとしている。
Top Image : © Texas A&M Engineering Communications