


News
2025.04.02
知財ニュース
NVIDIA、生成AI搭載のロボット用新技術「GR00T N1」公開―Google、Disneyと共同開発「Newton」などを発表

NVIDIAは2025年3月18日、AIカンファレンス「GTC 2025」にてヒューマノイドロボット開発を加速するための技術ポートフォリオを発表した。これには、汎用化されたヒューマノイドのリーズ二ングとスキルのための、世界初のフルカスタマイズ可能なオープンな基盤モデルである「NVIDIA Isaac GR00T N1」が含まれている。
その他にも、シミュレーションフレームワークや合成データ生成のためのツール「NVIDIA Isaac GR00T Blueprint」、Google DeepMindとDisney Researchと共同で開発中のロボット開発のために構築されたオープンソースの物理エンジン「Newton」も発表された。
2025年3月18日から利用可能となっている「GR00T N1」は、NVIDIAが事前トレーニングを行い、世界中のロボティクス開発者向けにリリースする予定のフルカスタマイズ可能なモデルファミリーだ。同社は、これにより、5,000万人以上と推定される世界的な労働力不足による課題を抱える業界の変革を加速させるとしている。
この基盤モデルは、人間の認知の原理に着想を得たデュアルシステムアーキテクチャを特徴としている。「System 1」は、人間の反射的あるいは直感を反映した素早い思考の行動モデル。「System 2」は、じっくりと考え、理路整然とした意思決定を行うためのモデルだ。
視覚言語モデルを活用した「System 2」は、環境と受信した指示に基づいて思考し、行動を計画する。その後「System 1」が、これらの計画を、正確で連続的なロボット動作に変換する。「System 1」は、人間によるデモンストレーションデータとNVIDIA Omniverseプラットフォームによって生成された膨大な量の合成データでトレーニングされている。
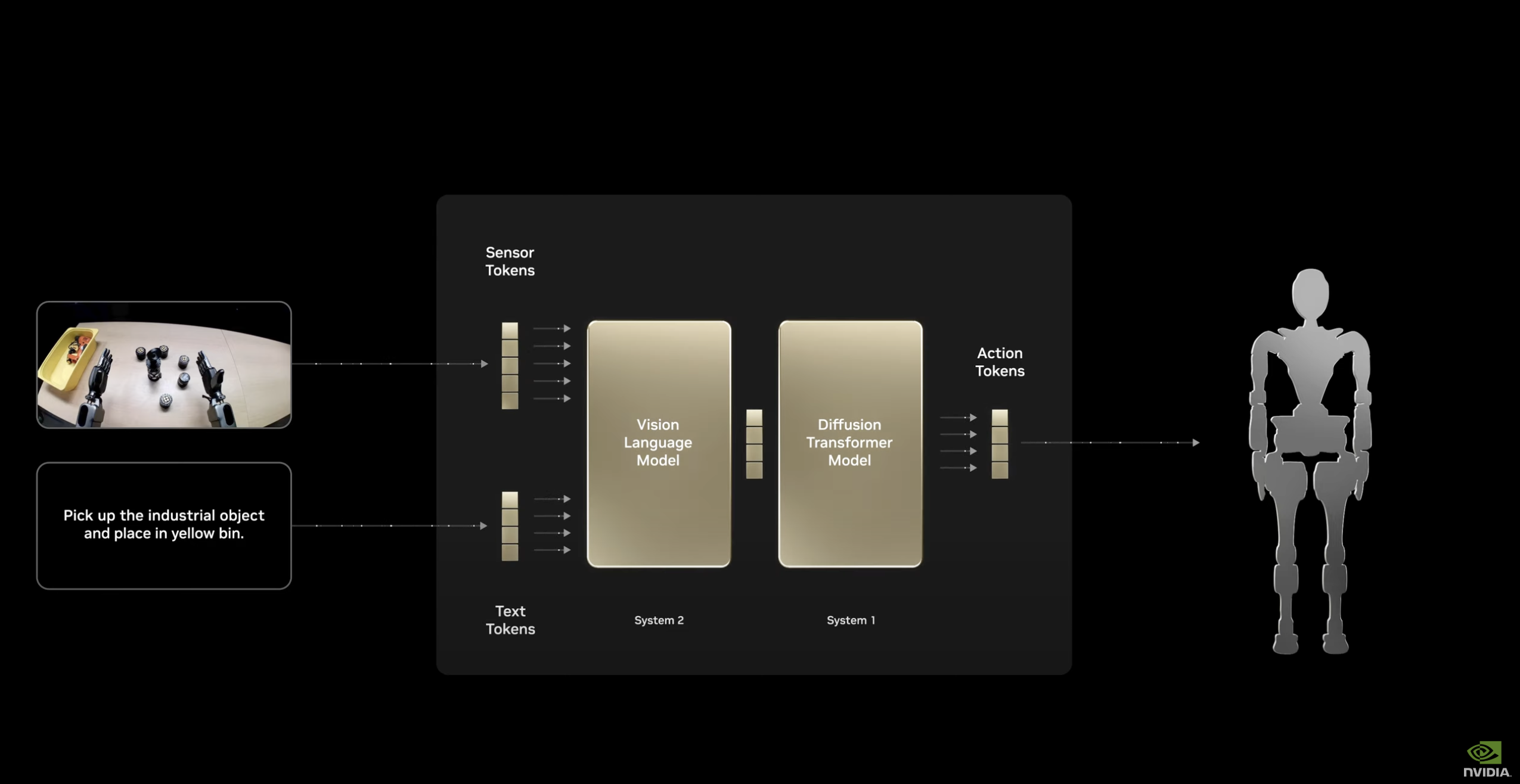
「GR00T N1」は、掴む、片方または両方のアームでものを動かす、物を片方のアームから別のアームに移動させるといった共通のタスクを容易に一般化し、長いコンテクストと一般的なスキルの組み合わせを必要とする複数のステップを実行できる。これらの機能は、マテリアルハンドリングや、包装、検査などのさまざまなユースケースに適応できるとのこと。
開発者と研究者は、特定のヒューマノイドロボットまたはタスク向けに実データや合成データを用いて「GRO00T N1」を事後トレーニングすることができる。「GTC 2025」では、トレーニング済みの1Xのヒューマノイドロボットが、家庭用の整頓タスクを自律的に行うデモを行った。
NVIDIAはGoogle DeepMindとDisney Researchと協力し、より高い精度で複雑なタスクを処理する方法をロボットに学習させる新しいオープンソース物理エンジン「Newton」の開発についても発表。
「Newton」は、ロボット学習に最適化されており、Google DeepMindのMuJoCoやNVIDIA Isaac Labなどのシミュレーションフレームワークと互換性を持つ。
NVIDIAとGoogle DeepMindは共同でMuJoCo-Warpを開発している。これにより、ロボティクスの機械学習ワークロードが70倍以上に高速化することが予想され、Google DeepMindのMJXオープンソースライブラリとNewtonを通じて開発者が利用できるようになる。
ロボット開発には、大規模で多様で高品質なデータセットが重要だが、その取得には多額の費用がかかる。同社は、少量の人間のデモンストレーションから大量の合成モーションデータを生成できる「NVIDIA Isaac GR00T Blueprint」も発表し、この課題の解決に役立つツールだとしている。
このBlueprintで、6500時間(あるいは約9か月分)の人間のデモンストレーションデータに匹敵する78万の合成軌跡を、わずか11時間で生成したのだという。この合成データを実データと組み合わせ、「GR00T N1」のパフォーマンスを実データのみ使用したときと比較して40%向上させた。
「NVIDIA GR00T N1」トレーニングデータとタスク評価シナリオはHugging FaceとGitHubからダウンロード可能。「NVIDIA Isaac GR00T Blueprint」は、build.nvidia.comでの双方向デモとしても利用可能であり、またGitHubからダウンロードできる。
Top Image : © NVIDIA Corporation