


News
2025.12.18
知財ニュース
川崎重工、4脚歩行ロボット「CORLEO」製品化へ―2035年を目標に開発

川崎重工は、2025年日本国際博覧会(大阪・関西万博)で展示した、4脚歩行のロボットモビリティ「CORLEO(コルレオ)」の製品化に向けた開発に着手したと発表した。2030年開催予定の「サウジアラビア・リヤド万博」の会場内モビリティとしての採用を目指すとともに、2035年の製品化に向けた開発に取り組む。
「CORLEO(コルレオ)」は、4脚歩行のオフロードパーソナルモビリティだ。2025年日本国際博覧会(大阪・関西万博)の未来社会ショーケース事業「フューチャーライフ万博・未来の都市」でコンセプトモデルを初披露し、SNSで累計約12億リーチを達成した。

ロボティクスがもたらす4脚の悪路走行性能に加え、モーターサイクルで培った操縦性と安定性を併せ持つロボットで、乗馬のように重心移動で操縦し、サポート機能により、誰でも簡単に山岳や水場などの難地形を安全に走行することが可能。

後脚部が前脚部とは別に縦にスイングすることで、歩行時や走行時の衝撃を吸収する。また、段差を登るときにライダーが見上げる姿勢にならず、進行方向の地形状況を確認しやすい姿勢を保つことができる。「水素」を燃料に、「水素エンジン」で発電する構造となっている。
同社は、社長直轄のプロジェクトとして開発専任組織(SAFE ADVENTURE事業開発チーム)を立ち上げ、2030年開催予定の「サウジアラビア・リヤド万博」の会場内モビリティとして採用されることを目指すとともに、2035年の製品化に向けた開発に取り組む。

「CORLEO」の製品化を実現するにあたり、乗車体験ができるライディングシミュレータの開発も行うとしている。このライディングシミュレータは、2027年中の完成を目標としており、「CORLEO」の開発過程で得られた3Dモデル、モーションデータを含めたシステム全体をゲーム・eスポーツ業界に展開することも視野に入れている。
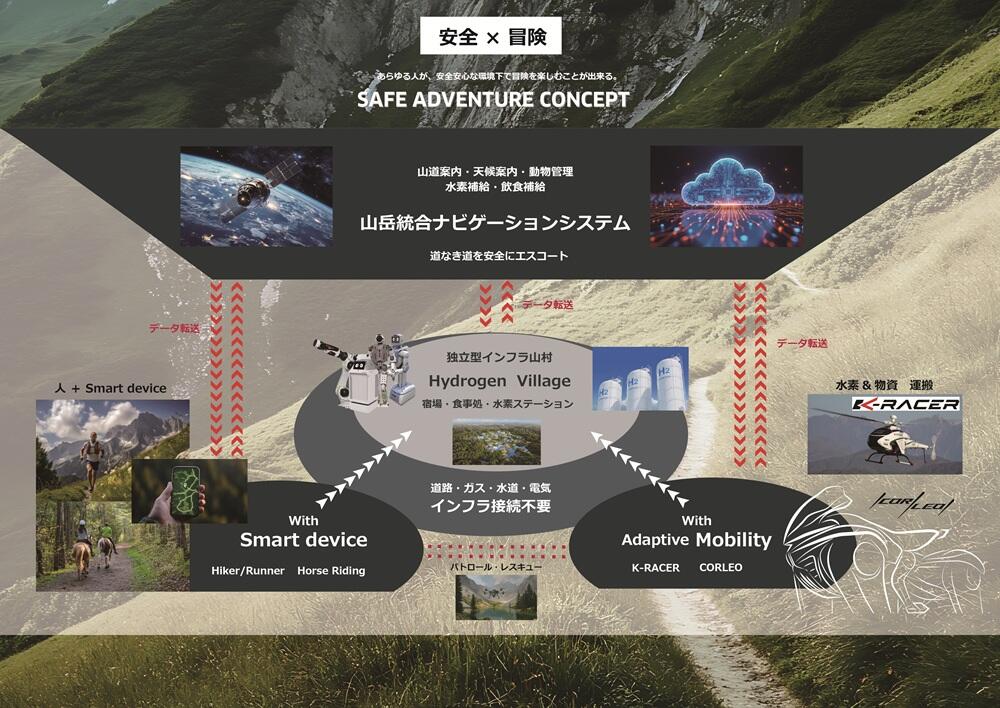
さらに、「CORLEO」の開発を中核プロジェクトとしながら、誰もが安全に安心して山岳地を楽しめ、山岳事故ゼロを目指す「SAFE ADVENTURE」のコンセプトに基づき、天候や気温、路面状況、野生動物の出現を検知し、スマートフォンなどのデバイスを介して安全なルートを案内するナビゲーションシステムも開発する予定だ。
Top Image : © 川崎重工業 株式会社