


No.620
2022.03.02
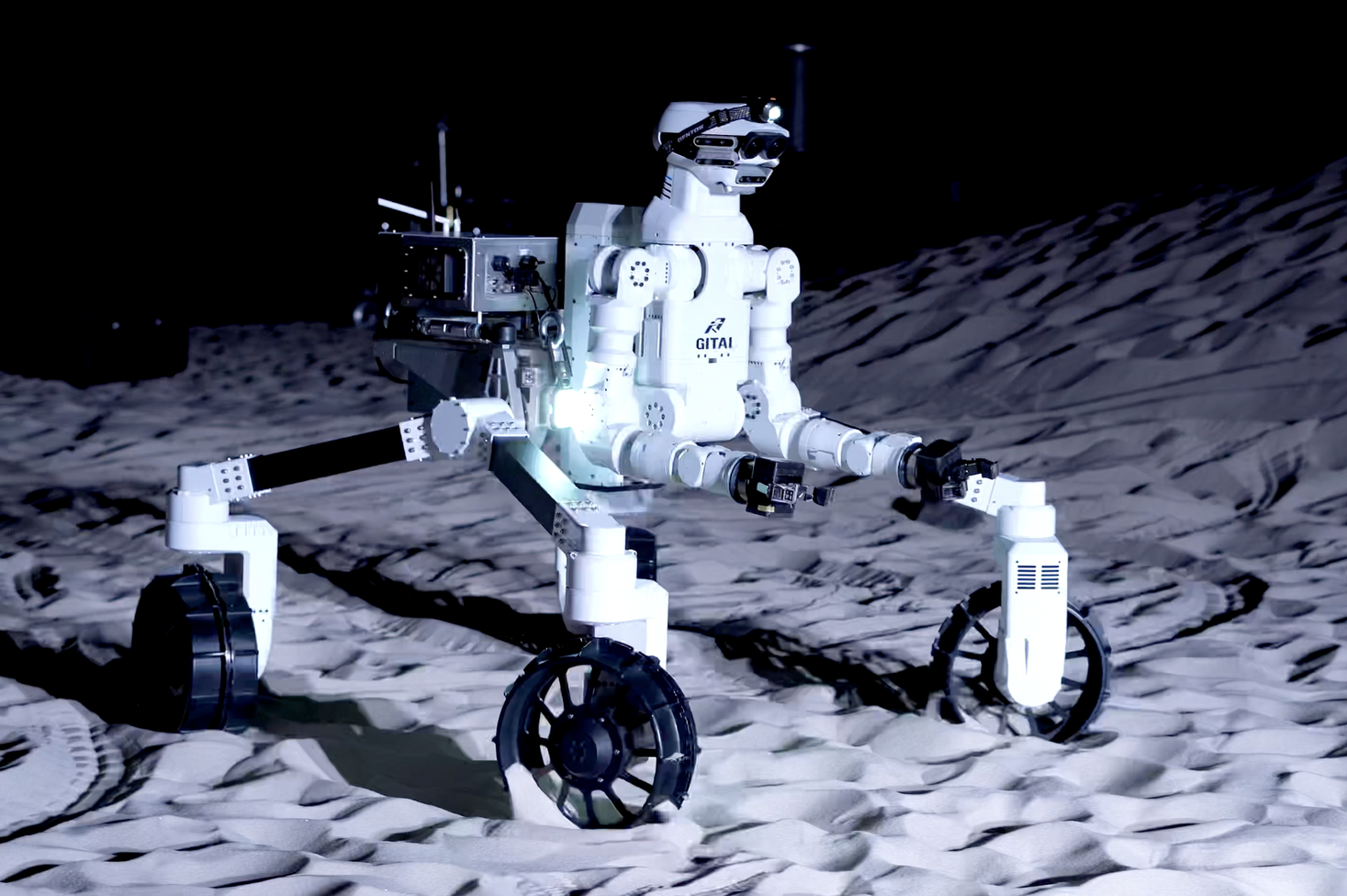
走破性と汎用性を兼ね備えた月面作業用ロボット
ロボットローバーR1
概要
「ロボットローバーR1」とは、宇宙飛行士の代わりに月面作業を行うためのロボット。探査、採掘、点検、保守運用、宇宙組み立てといった汎用的な作業ができる。近年、各国で月面資源探査や基地開発競争が加速し、従来の宇宙飛行士よりも安価かつ安全なロボット労働力の需要が急増。こうした状況で開発された「ロボットローバーR1」は、模擬月面環境での複数の作業・走行試験をクリアし性能の高さを実証しており、将来的には月面での使用を目指した作業性能のさらなる向上が期待されている。
なぜできるのか?
遠隔操作による高い汎用性
「ロボットローバーR1」は、遠隔でアームを操作し細かい汎用的な作業が可能。実証実験では、月面基地開発で重要となるソーラーパネルの組み立てや模擬月面上での砂の採取・格納に成功した。
高度な走破性
「ロボットローバーR1」は、全方向に向きを転換できる特殊な脚を搭載。実証実験では、数10cmサイズの岩を乗り越える試験や、傾斜15度~20度の砂丘を登頂する試験が行われ、それらを走破できる高度な移動・障害物走破性能を確認した。
相性のいい産業分野
この知財の情報・出典
この知財は様々な特許や要素技術が関連しています。
詳細な情報をお求めの場合は、お問い合わせください。
Top Image : © GITAI Japan 株式会社