


No.718
2022.06.02
惑星でのマルチな輸送を実現する多目的ローバー
FLEX(フレックス)

概要
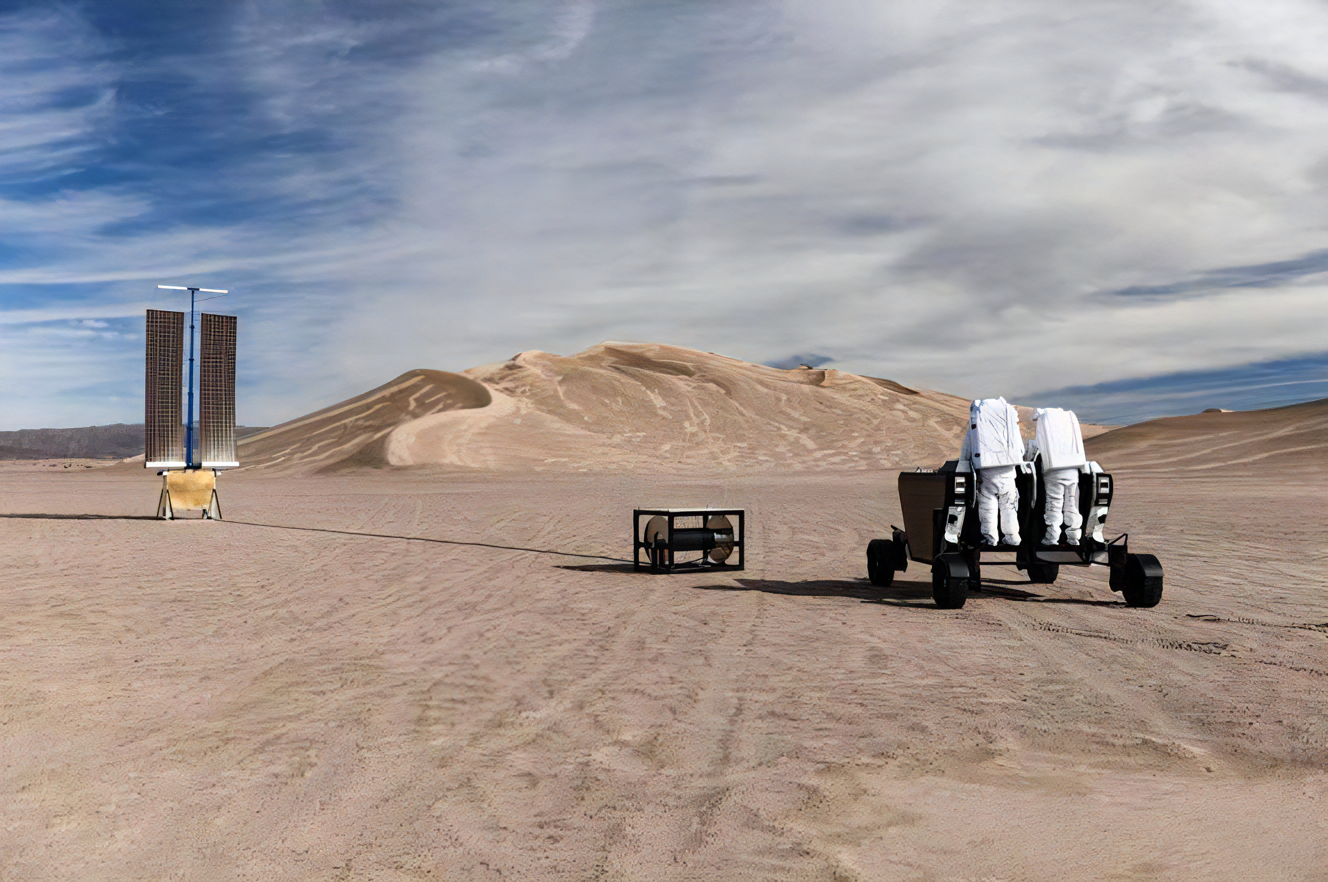
「FLEX(フレックス)」とは、惑星での幅広い物流運送を実現する多目的ローバー。遠隔操作による自律走行と有人運転が可能で、作業員は2名まで、貨物はさまざまな形状のものを最大400kgまで(大きさは1.5m×2.0m×1.0mまで)積載できる。また、多関節のロボットアームを搭載し、貨物の積み下ろしや作業員のサポートが可能。過酷な環境下でも効率よく運搬が可能なことから、惑星での有人探査のほか、地球上での活用も期待されている。
なぜできるのか?
オフロードでの高い走破性
柔軟で頑丈な車輪により、柔らかい地盤でも機動性を確保。また、関節式の特殊な車輪とサスペンションにより、柔らかい地盤でも機動性を確保。また、関節式の特殊な車輪とサスペンションにより、起伏の激しい地形でも車体を水平に保ち、車体にかかる衝撃を吸収。障害物が多い惑星上でも安定的な走行を実現する。
簡単かつ安全な有人運転
「FLEX」は、速度調整用の3つのボタンを備えたジョイスティックで、有人による直接運転が可能。ドライバーは「トリガー」を作動させることで運転し、宇宙飛行士が落下した場合にはすぐに停止する。
高利得アンテナによる通信機能
「FLEX(フレックス)」は、地球との広帯域通信を維持できるジンバル式のアンテナを装備。地球との直接通信による遠隔操作を可能にする。
太陽光による自家発電
「FLEX」の4輪操舵には、3㎡の折り畳み式太陽電池パネルを搭載。走行エネルギーを自家発電し、内蔵バッテリーに蓄電できる。
半自律走行のためのセンサー
ローバーの前方には、ナビゲーションシステムと危険を検知する各種センサーを搭載。画像認識などにより障害物を検出し、安全な走行を実現する。
相性のいい産業分野
この知財の情報・出典
この知財は様々な特許や要素技術が関連しています。
詳細な情報をお求めの場合は、お問い合わせください。
Top images:© Venturi Astrolab, Inc.