


News
2023.09.19
知財ニュース
タカラトミーの変形月面探査ロボ「 SORA-Q 」が打ち上げ成功─日本初の月面走行ロボットになる可能性

株式会社タカラトミーが、国立研究開発法人宇宙航空研究開発機構(JAXA)、ソニーグループ株式会社、同志社大学と共同開発した超小型の変形型月面ロボット「LEV-2(レブツー)愛称:SORA-Q(ソラキュー)」が、JAXAの小型月着陸実証機「SLIM(スリム)」に搭載されH-IIAロケット47号機(H-IIA・F47)により、種子島宇宙センターから2023年9月7日8時42分11秒(日本標準時)に打上げられた。

ロケットは計画通り飛行し、 SLIMは約47分33秒後にロケットから正常に分離された事が確認された。今後「 SORA-Q 」は数ヶ月かけて着月を目指し、月面で走行する日本最初のロボットになる可能性が高いとして注目を集めている。

打ち上げに先立ち、8月26日(土)には、葛飾区内の小学生と保護者を対象にタカラトミー本社にて「SORA-Q打上げ応援イベント」が行われた。イベントには宇宙系動画クリエイターとして活躍している「宇宙のはるちゃん」がゲストとして参加。「SORA-Q」の特徴や宇宙について解説する“宇宙教室”のほか、「SORA-Q」の1/1スケールモデル「SORA-Q Flagship Model」(2023年9月2日発売)の操作体験などが実施された。

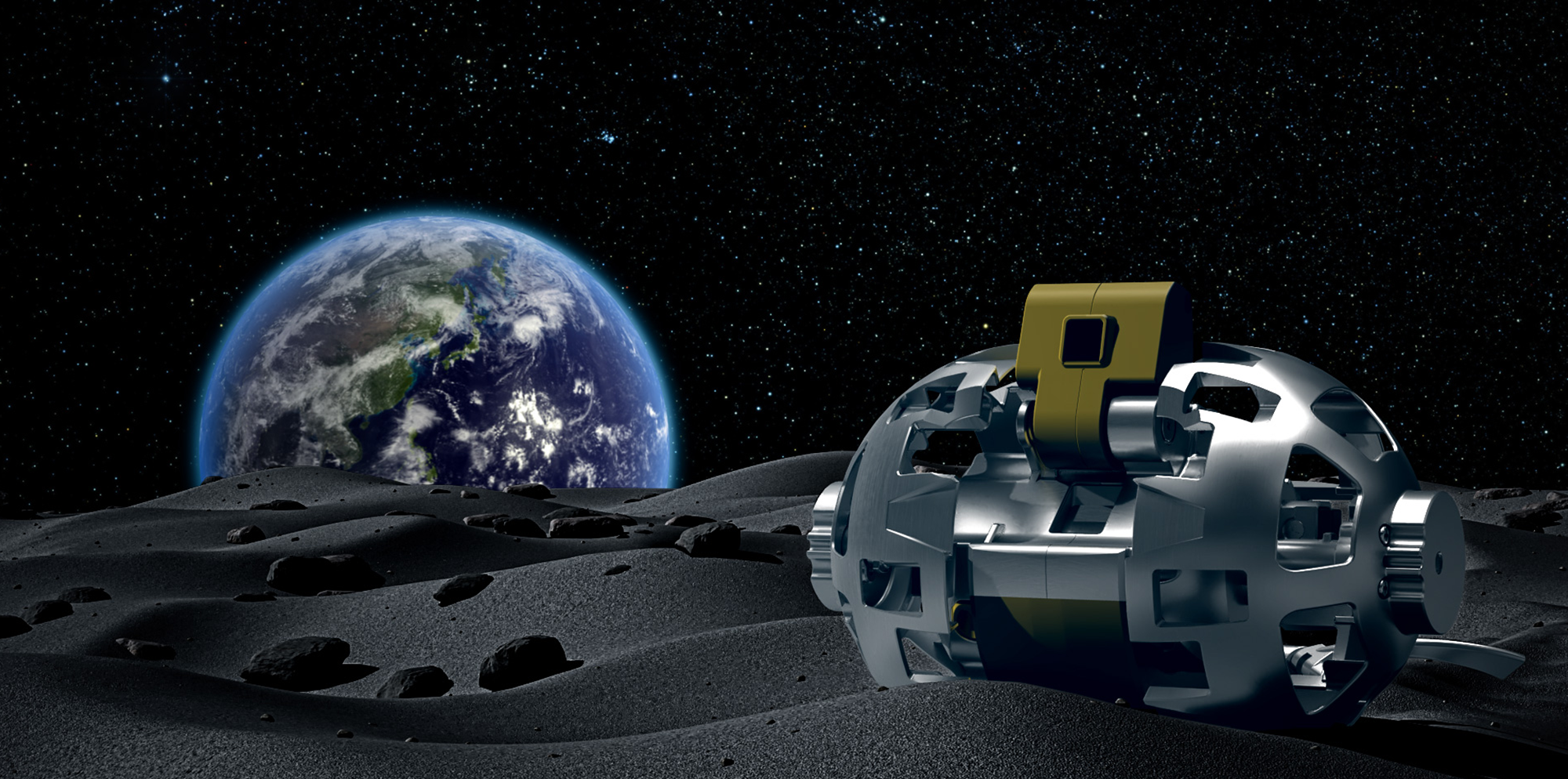
「 SORA-Q 」は、直径約80mm、質量約250gの超小型変形型月面ロボットの愛称。開発にはタカラトミーの玩具作りにおいて培われた小型化、軽量化の知見と、変形機構に関わる技術が活用された。
JAXAの「宇宙探査イノベーションハブ」共同研究提案公募の枠組みの下、2016年からJAXAおよびタカラトミーが筐体の共同研究をスタート。その後、2019年にソニーが、2021年に同志社大学が加わり、4者共同で開発が進められてきた。
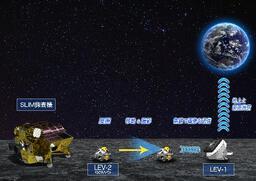
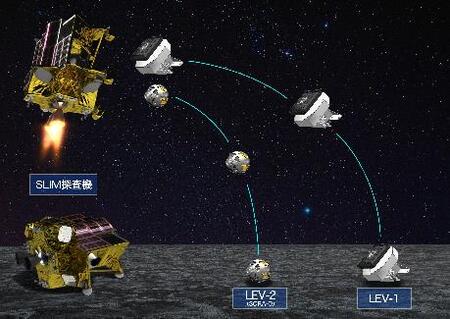
月面低重力環境下における超小型ロボットの探査技術の実証を目的とし、JAXAの宇宙探査イノベーションハブとして初めて月面での実証を行うもので、SLIMの月着陸直前にもう一台のロボット「LEV-1」とともに放出される予定。
SORA-Qは月面に着陸後、瞬時に球体が左右に拡張変形し、月面を走行し、搭載された前後2つのカメラで写真撮影をするとともに、月面走行時のデータを取得。その後、「LEV-1」を経由して、写真や走行データを地球へと送信する計画だ。
来年2024年2月2日にタカラトミーの創業100年を迎えるタイミングでの今回の打ち上げについて同社は、「創業以来守り続けてきたおもちゃ作りの原点である、安心・安全な品質と細部にまでこだわる職人魂、柔軟な発想力、子どもたちを笑顔にしたいという強い想いが今回の宇宙探査に活かされることで、子どもたちがこれまで以上に自然科学領域に興味を持ち、宇宙の面白さを知ってもらうきっかけとなってくれることを心から願っている」と感慨深い思いを語っている。
Top Image : © 株式会社 タカラトミー