


News
2024.05.01
知財ニュース
J-オイルミルズと大阪大、咀嚼ロボットで食感を科学的に評価
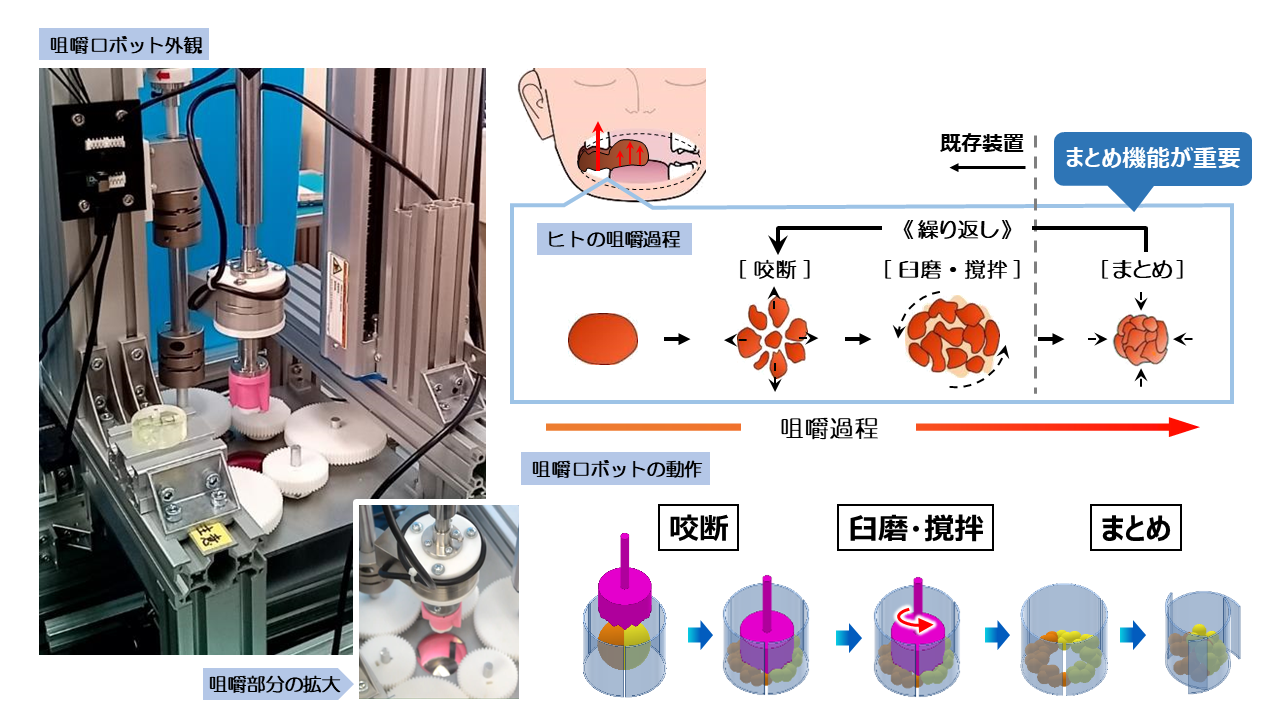
J-オイルミルズが大阪大学大学院工学研究科の東森充教授と共同で開発した、ヒトの咀嚼過程を再現できる咀嚼ロボットの研究成果が、「日本機械学会学術誌」に掲載された。ヒトの咀嚼の仕組みを再現したロボットで、食品の評価への活用が期待されている。
J-オイルミルズは油脂製品のほか、でんぷんなどのテクスチャー素材の製造や販売も行っているが、でんぷんは食感をコントロールし、ジューシーさの実現や食感の改良など食品の機能性向上に役立ち、食品のおいしさは味や香りだけでなく、歯ごたえ、弾力、舌触りなどの食感も重要な要素であるとして、かねてから、食感の評価に当たって重要な構成要素となる「咀嚼」に着目。
しかし、食品開発の現場で従来使われてきた食感測定の装置は、ほとんどが咀嚼工程のうち咬断のみを対象としており、一部の装置でもかくはん機能までで、食塊を作ることができないため食感の一部分しか評価できなかった。
そこで、「食品の評価に重要な咀嚼の全工程を評価したい」と考えた同社と大阪大学大学院工学研究科の東森充教授が2018年より研究をスタート。
今回、ヒトの咀嚼機能を整理し、必要な機構を検討したことにより、咀嚼の最終工程である「まとめる」機能を持った咀嚼ロボットが開発されたという。
咀嚼ロボットは従来の装置と同様に力学データを取得できるだけでなく、咀嚼過程の視覚データも取得できる。従来の装置では不足していた、時間軸での変化や咀嚼過程の見える化が実現できることにより、今までよりもヒトの感じる複雑な食感の評価が可能になる。
同社は、「今後は、咀嚼ロボットを用いてヒトの咀嚼の仕組みを再現することで、当社製品の販売拡大やテクスチャー素材の新規開発につなげ、当社の目指すべき未来『おいしさ×健康×低負荷』の実現を目指していく。また、咀嚼の評価を必要とする異業種とのコラボレーションなども検討していきたい」としている。
Top Image : © 株式会社 J-オイルミルズ
この記事のタグ