


No.485
2021.11.09
水中での浮き沈みを操作できる葉っぱ型ロボット
Underwater maneuvering of robotic sheets through buoyancy-mediated active flutter
概要
「Underwater maneuvering of robotic sheets through buoyancy-mediated active flutter」とは、葉っぱのように平らで薄く軽い物体が落下・浮上する際の動きを制御するシステムである。このシステムによって物体を水中の特定の位置に落下させたり、水面のどこに浮上するかを制御したりできる。制御には局所的な密度や浮力分布をさまざまに変えられる葉っぱ型のロボットを活用している。将来、海のゴミや汚染物の回収など、水中での制御が必要なロボットへの活用が期待される。
なぜできるのか?
体積の変化を利用
電流を流し加熱すると、エラストマー(ゴム弾性を有する素材)に包まれた液体の体積が連続的に大きく変化する。この変化によって動きを制御し物体を特定の位置に誘く。
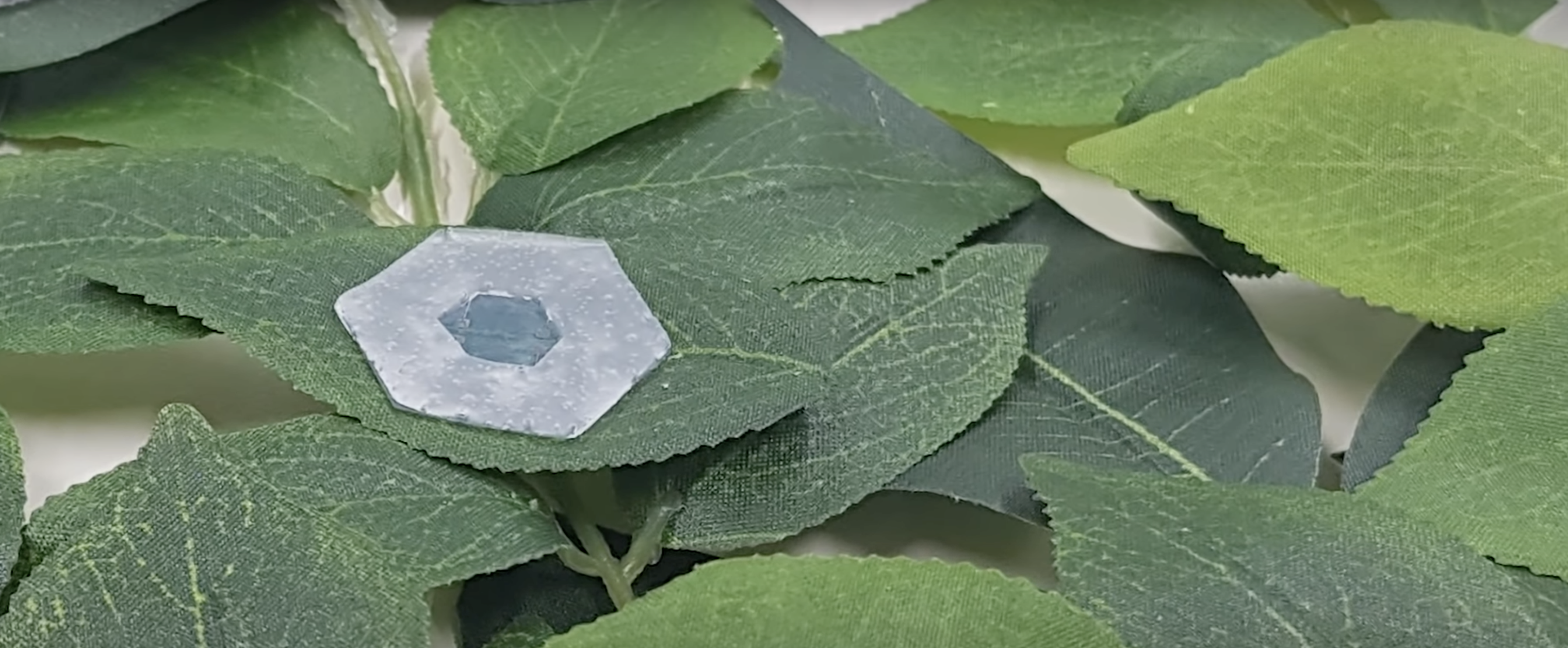
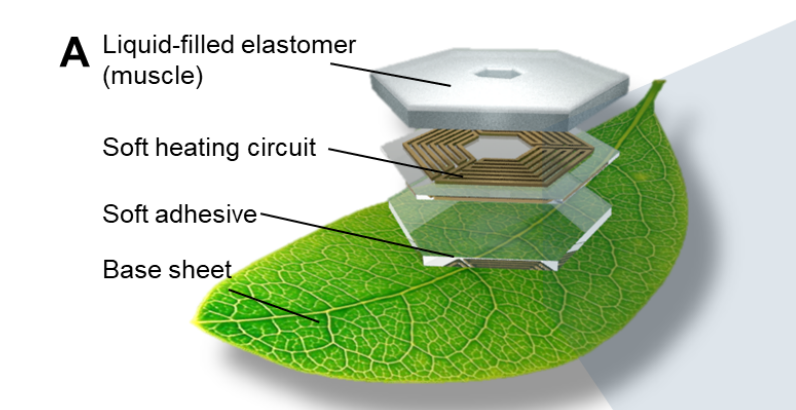
葉っぱ型ロボット「Swimming leaf」を活用
Swimming leafはベースとなる葉っぱシートの他に、液体エラストマー、柔らかい加熱回路、接着剤で構成。不均一な質量分布を持ち、局所的な密度や浮力分布を能動的に変えられる。
活用シーンを想定した実験
水槽内の落下時に特定の位置へと誘導するプログラムや、底面から水面に上がってくるプログラムを組んで実験。葉っぱ型ロボットは指定した位置への落下し、また浮上にも成功した。
相性のいい産業分野
- 環境・エネルギー
海に流出した油や汚染物質を吸着して回収するロボット
- 農業・林業・水産業
海洋の狙った部分に物体を沈ませ、浮かべることのできるシステムを利用した新たな漁法
- ロボティクス
ロボットが水上や水中で特定の場所に移動するためのセンサー技術
- アート・エンターテインメント
操作によって動きや模様が変化する水上アートや広告
この知財の情報・出典
この知財は様々な特許や要素技術が関連しています。
詳細な情報をお求めの場合は、お問い合わせください。
Top Image : © Biorobotics Laboratory, Seoul National University