


No.607
2022.02.21
人の手の動作を忠実に再現するアバターロボット
MELTANT-α(メルタント・アルファ)
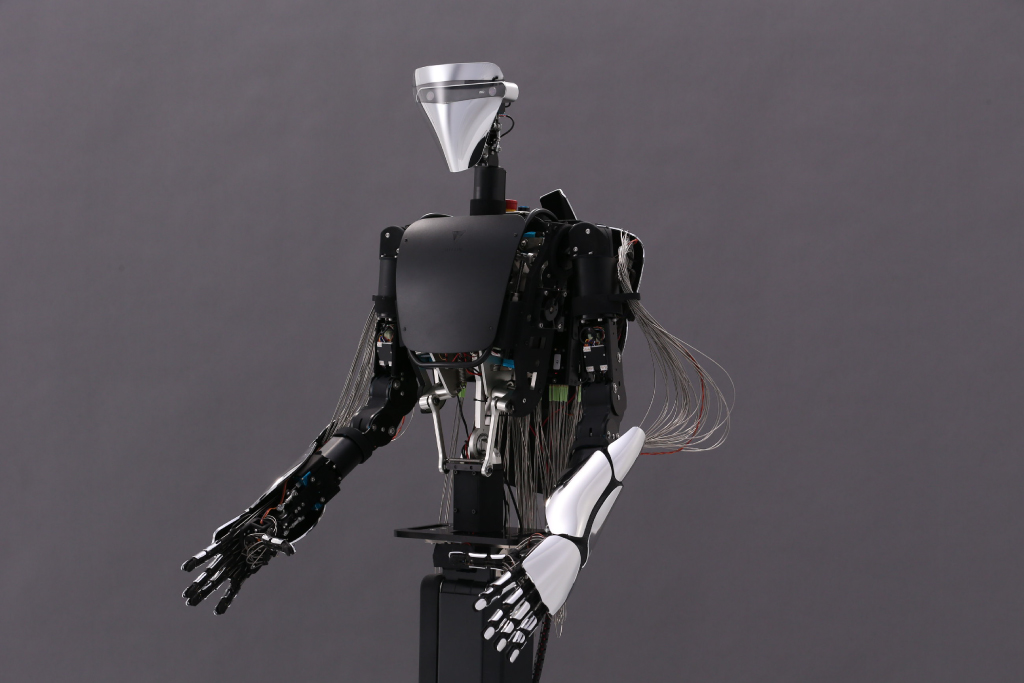
概要
「MELTANT-α(メルタント・アルファ)」は、人の手の動作を忠実に再現できるアバターロボット。筋肉や腱、関節による複雑な手の動作を模倣し、それらをワイヤー駆動を用いることで忠実に再現することができる。従来、ワイヤー駆動によるロボットハンド操作は制御が難しく、人の手のような繊細な動きを再現することは困難だった。一方、MELTANT-αは独自の制御アルゴリズムによって、卵を割らずにつかんだり、ペットボトルのキャップを開けたり、4kg以上の物体を両手で支えるといった、力強さと繊細さを両立した動作の再現が可能。将来的には、人が入れないような過酷な環境下での作業や、リモートでの警備などさまざまな分野での活用が期待されている。
なぜできるのか?
生体模倣により、動作の力強さと繊細さを実現
MELTANT-αの動作構造は、人の手の構造を徹底的に調べ、「生体模倣」することから着想を得ている。複数の筋肉群が複数の関節を動かす手の動きを、ワイヤー駆動と独自の制御アルゴリズムによって再現。従来のロボットではできなかったような力強く繊細な動きを、人の手と同等のサイズ・重量で可能にしている。
動作をリアルタイムで忠実に解析する処理技術
MELTANT-αは、独自の生体信号処理アルゴリズムによって、多彩な生体信号を高精度かつリアルタイムで解析可能。チョキや親指を曲げる、手首をそらすといった複雑な動作を約0.02秒で追従し再現することができる。また、情報送信のアルゴリズムを最適化することで、18,900 km離れた場所からでも遅延なく動作させることが可能。
過酷な環境下にも適応するプロダクト設計
MELTANT-αは、独自の駆動メカニズムによって、アクチュエータ(駆動装置)にかかる負荷を分散。万が一の故障の際も、他の正常なアクチュエータで動作を補うことができ、過酷な環境下でも適応し作業できる。また、ワイヤは弾力性を持つ高分子ワイヤーを使用しており、耐衝撃性能も高い。
力覚をフィードバックする事で力加減を調整可能
MELTANT-αは、モノをさわった時に感じる反力感覚である「力覚」を操作者にフィードバックする機能を実装。作業時の力加減を直感的に調整することができる。現在は圧力のフィードバックが実現可能であり、今後は質感のフィードバックも実現予定。
相性のいい産業分野
この知財の情報・出典
この知財は様々な特許や要素技術が関連しています。
詳細な情報をお求めの場合は、お問い合わせください。
Top Image : © 株式会社 メルティンMMI