


Pickup
2021.11.19
レポート | 体験レポート
未来の情報技術が集結する「NTT R&Dフォーラム Road to IOWN 2021」―知財ハンターが注目した最新テック6選
NTT/日本電信電話 株式会社

NTTは2021年11月16日〜19日の期間で「NTT R&Dフォーラム Road to IOWN 2021」をオンラインで開催。本フォーラムは、2019年にNTTが提唱したIOWN(アイオン)構想についての具体的な内容や、宇宙・環境負荷ゼロの新たな取り組みも含めて、NTTグループR&Dの最新研究成果について、講演、展示を通じて紹介することを目的としたフォーラムです。
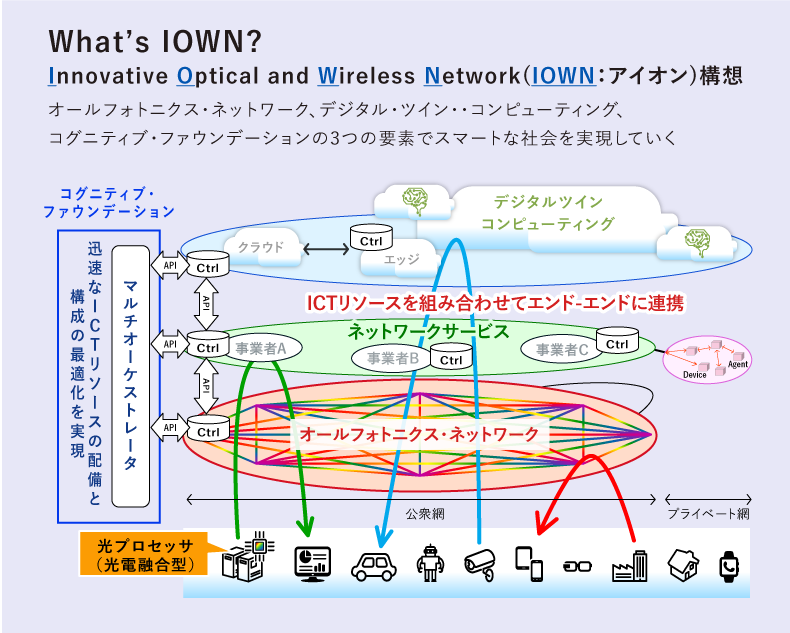
IOWN構想とは?
IOWN(Innovative Optical and Wireless Network)構想とは、あらゆる情報を基に個と全体との最適化を図り、多様性を受容できる豊かな社会を創るため、光を中心とした革新的技術を活用し、これまでのインフラの限界を超えた高速大容量通信ならびに膨大な計算リソース等を提供可能な、端末を含むネットワーク・情報処理基盤の構想です。2024年の仕様確定、2030年の実現をめざして、研究開発を始めています。(NTT 公式HPより)
今回の展示は基調講演をはじめとした講演、セミナーがスケジュール配信され、各展示においては説明動画の視聴に加えてQ&Aコーナーで研究者との質疑が可能となっています。
当レポートでは、6つのカテゴリーに分けられた展示から、それぞれ知財ハンターが注目した最新テックを紹介します。
遅延揺らぎ制御技術による低遅延遠隔ロボット操作の共同実証実験【ネットワーク】
◯分身ロボットOriHime-Dのナチュラルな操作を実現します
【概要】IOWNの大容量低遅延な伝送基盤と遅延揺らぎ制御技術により、人が操作するコミュニケーションロボットに適したネットワークを実現することで、パイロットがタイムラグを感じないストレスフリーな遠隔ロボット操作環境を提供できることを、分身ロボットカフェDAWN ver.βでの共同実証実験を通じて確認しました。
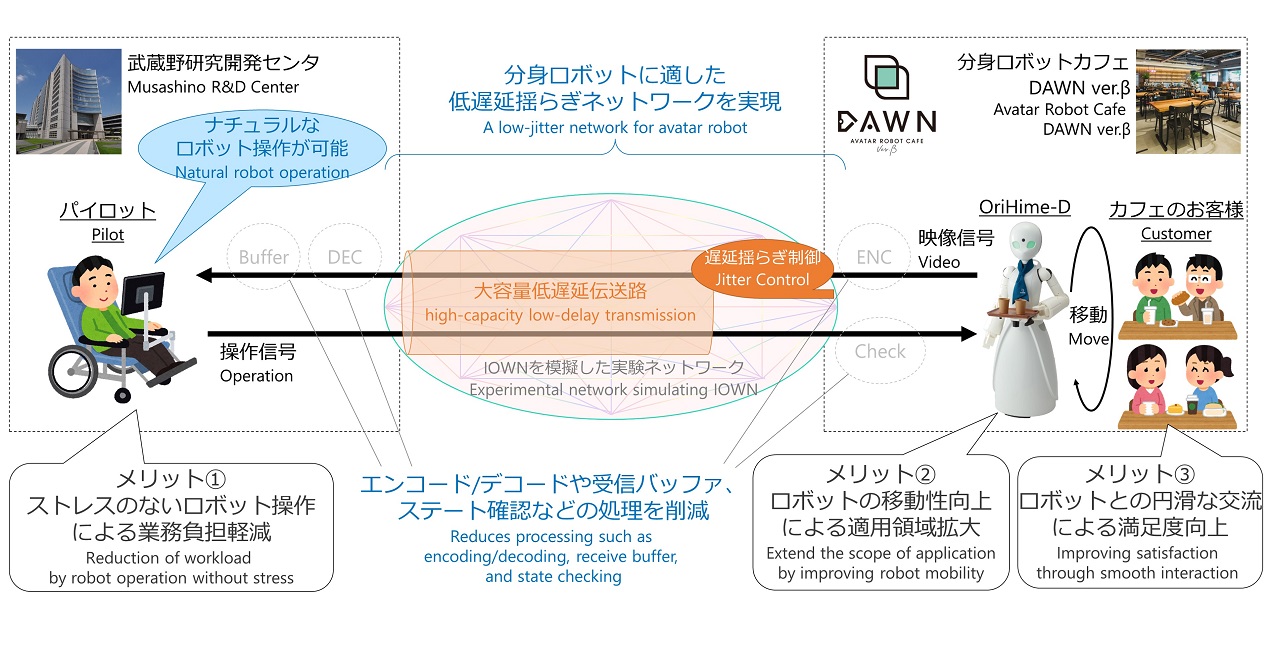
こちらはNTTのネットワーク技術と、株式会社オリィ研究所の分身テレワーク・ロボット「Orihime-D」による共同研究。従来の課題として、ロボットが動作した結果をカメラが撮影し、撮影した映像がパイロット(操作者)側のモニターに表示されるまでの映像遅延が大きいという課題がありましたが、NTTの「低遅延揺らぎネットワーク」によりこれを解決。人がロボットを遠隔操作して業務やコミュニケーションを行う分身ロボットワークが、より身近なものになりそうです。
運動能力拡張を実現するサイバネティックス技術【UX/UI・デバイス】
◯他者運動を元に運動能力を拡張します
【概要】熟練者や過去の自分の運動を保存し、今の自分の体に転写することで、一時的・恒久的に運動能力を拡張する技術に取り組んでいます。言葉で説明するのではなく、直接体に教えることで、運動能力向上や運動学習支援をめざしています。
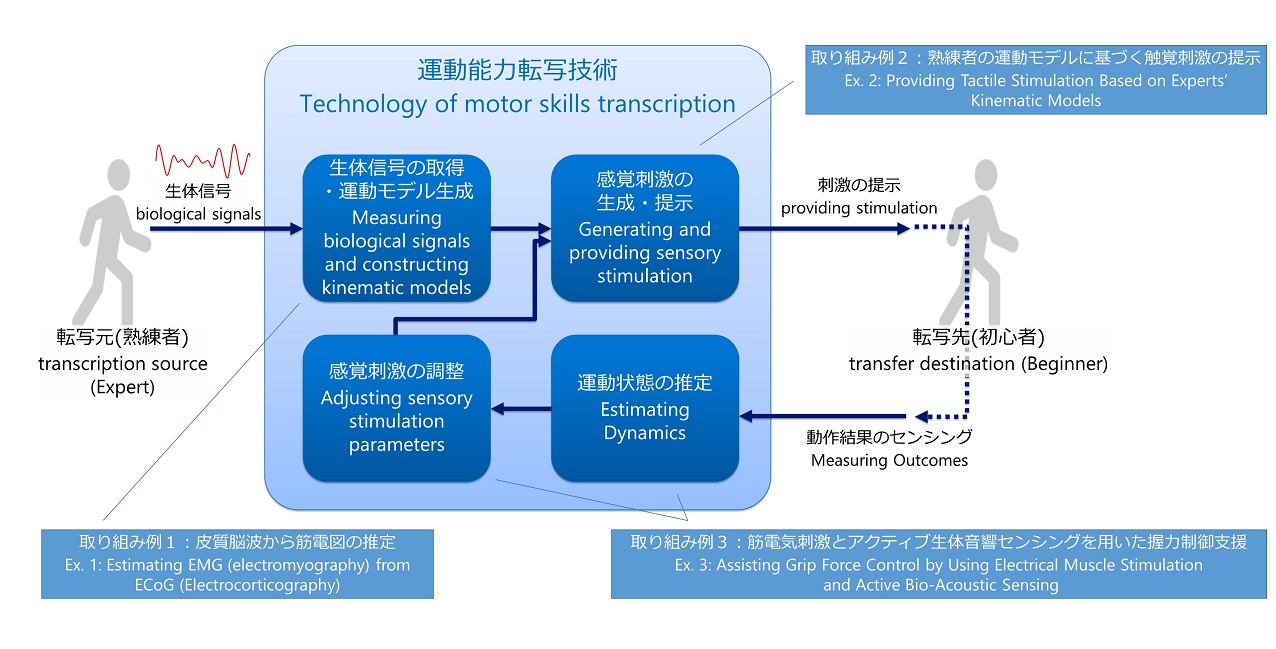
脳波・筋電位などの生体信号を解析し、そのデータを自分の体に「転写」することで運動能力を拡張しようとする技術です。自身の過去の運動記録を元にしたリハビリテーションやスポーツトレーニング、熟練者の筋肉動作に基づく筋電気刺激による初心者の運動学習など、あらゆる分野で応用ができそうです。動きと感覚をデジタル化する「BodySharing(ボディシェアリング)」や、動きを知財化するプラットフォーム「MOTIONBANK(モーションバンク)」などにも通ずる、「動きのデータ化・価値化」の促進に貢献しそうな技術です。
ポスト・トゥルース時代のユーザを守る誤情報拡散抑制技術【セキュリティ】
◯SNSユーザが誤情報に晒されにくい環境を実現します
【概要】ポスト・トゥルース時代における新たなサイバー脅威であるSNS上での誤情報の拡散に対して、ユーザの行動やユーザ同士の繋がりの情報をもとに誤情報の拡散現象を記述するモデルを構築し、モデルに基づいて適切な介入手段を創出することにより誤情報の拡散が発生しにくいプラットフォーム環境の構築をめざします。
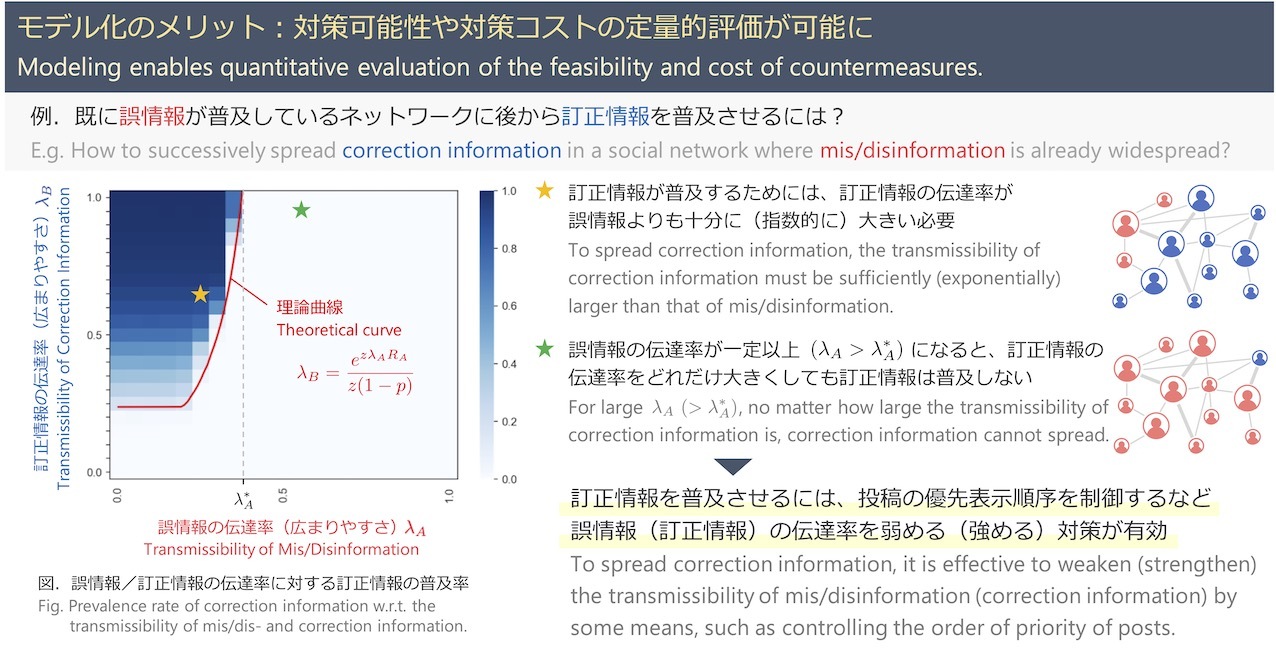
SNSがあらゆる世代に浸透した現代において、「フェイクニュース」は人々の意思決定や行動までに影響を及ぼしかねない大きな社会問題となっています。現状の主な対策は、フェイクコンテンツを削除・ブロックしたり信頼性の高い情報を新たに提示する、といった“いたちごっこ”状態となっていましたが、本技術が発展すれば、拡散モデルに基づいて誤情報が拡散しづらい環境を構築することが可能となります。SNSにおける誹謗中傷の実態を見える化する「Mention Analyzer」と組み合わせれば、ネットにおける悪意の扇動を未然に防ぐことができそうです。
画像理解に基づき話題を展開する雑談対話技術【コンピューティング】
◯移動中の風景を話題にロボットと雑談を楽しめます
【概要】クルマから見える移り変わる景色を話題として、パートナーのように知識応答や共感応答をする対話システムの研究です。日本語最大規模の深層学習対話モデルに画像理解技術を組み合わせることで、あたかも気のおけない友人と外の景色を見ながらドライブ旅行しているかのような対話を実現します。
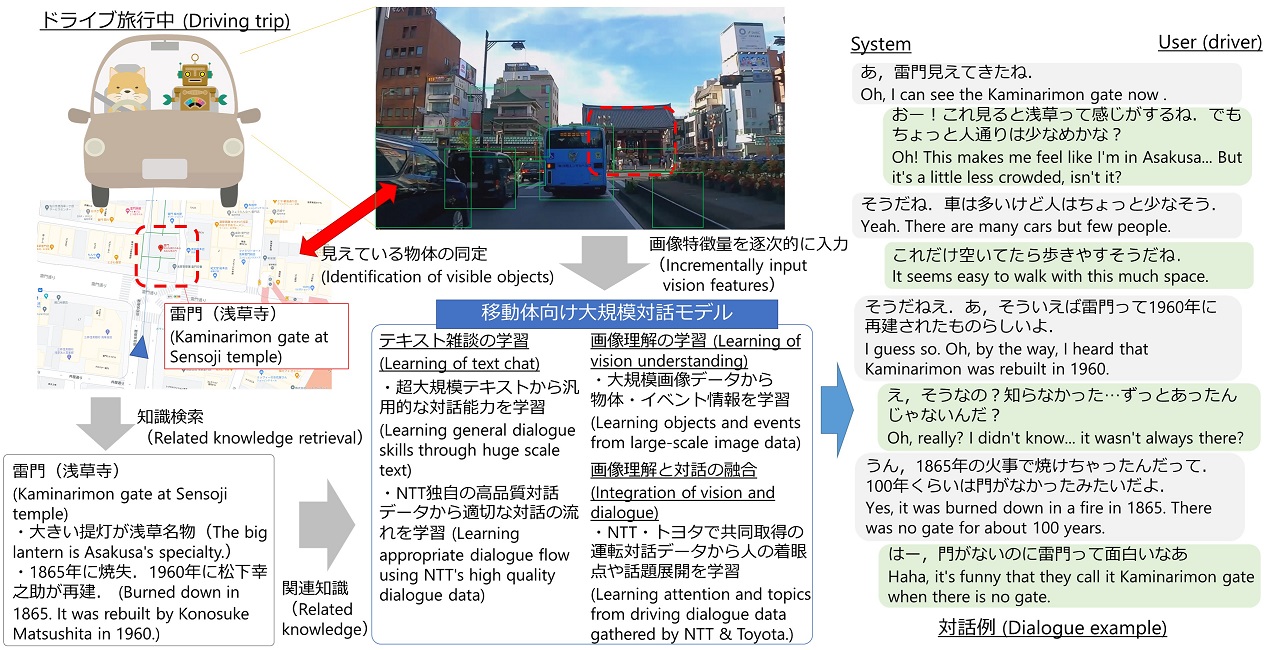
NTTの超大規模深層学習対話モデル・画像キャプショニング技術・雑談対話システム技術の融合により生まれた、ドライブ・パートナーロボット。自動運転や「空飛ぶ車」など、モビリティの進化はめざましい昨今ですが、この技術が組み合わされば新たな未来の運転体験が創出できそうです。運転中に、見過ごしがちな美しい風景を自動記録してくれる写真サービスも付随すれば、なお面白そうです。
落雷制御・充電技術【環境負荷ゼロ(環境・エネルギー)】
◯落雷を受けても故障しないドローンで、落雷から街を守ります
【概要】スマート社会の課題である落雷被害を未然に防ぐため、ドローンを利用した落雷制御・充電技術を研究しています。落雷が直撃しても誤作動・故障しない耐雷ドローン技術に加え、数分後の雷雲状況・発雷点を詳細に予測する技術により、落雷を高精度に捕捉し、充電車などに導きます。2030年の実用化をめざしています。
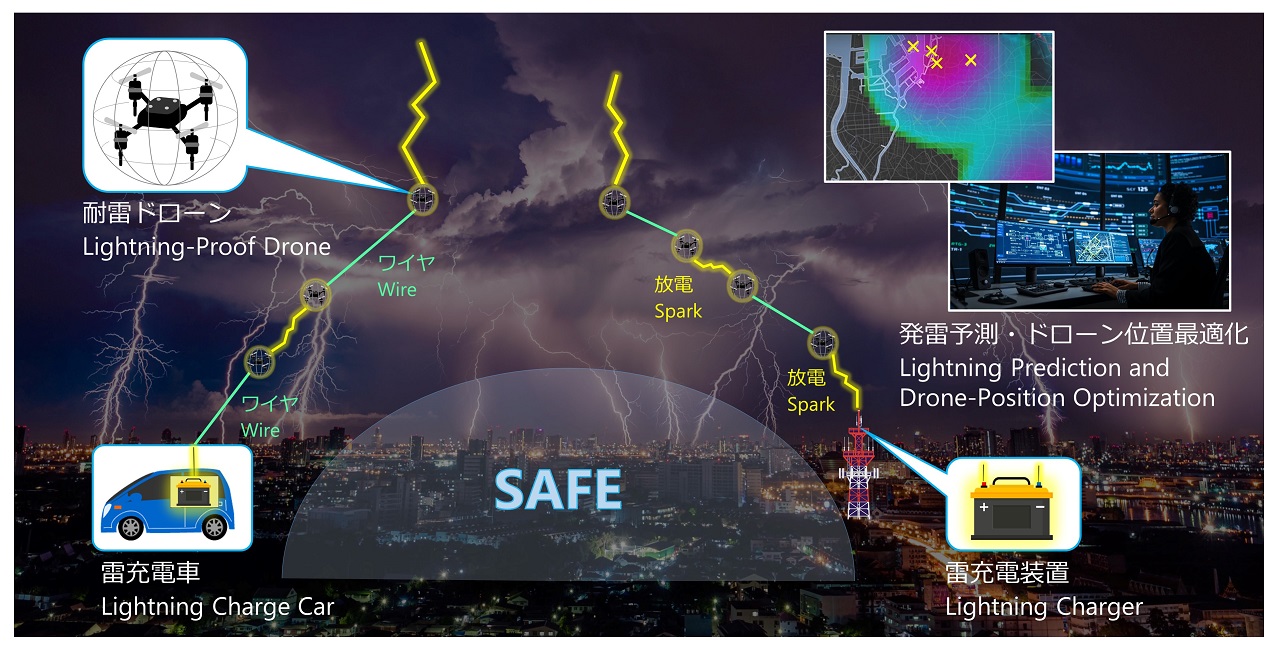
今後ますます高度化するICT社会において、落雷被害の防止は重要な課題となってくきます。NTTは、世界初の開発となる「耐雷ドローン」で落雷そのものをコントロール、重要設備への落雷を防ぎ、さらに雷から電力を取得する「落雷制御・充電技術」を開発しています。通信・電力・交通といった重要インフラへの落雷被害を防止しながら電力のエネルギーの取得までができるというこの技術、雲を3Dスキャンする「EAGLEレーダー」と組み合わせると、さらに高精度な気象データを取得できそうです。
柔軟で生体にやさしいゲルの構造をチップ上で自在に操ります【基礎研究】
◯柔軟で生体にやさしいゲルの構造をチップ上で自在に操ります
【概要】生体に優しい材料 “ハイドロゲル”をさまざまな形状へ制御する技術に取り組んでいます。今回、膨張率の異なる界面で観察される“座屈剥離”を応用し、ゲル薄膜をチップ上で管状構造へと形状制御できることを見出しました。本構造は立体的な細胞培養基材として利用でき、将来はオンチップ型人工臓器への展開をめざしています。
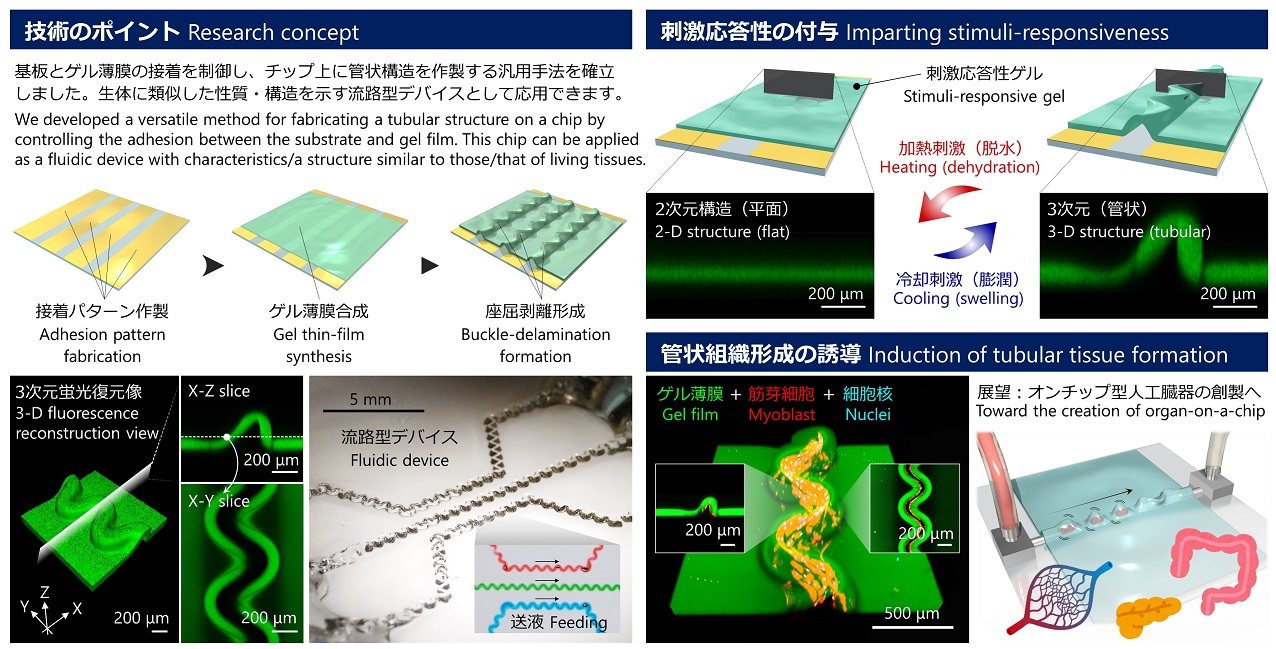
生体に優しいゲルを自在に操ることで、オンチップ型の人工臓器モデルの創製を目指す技術。ヒトの各種臓器の働きを、精細なデータ取得が可能なチップの上で再構成することが可能となり、将来的には得られたデータを活用することで、臓器のデジタルモデルを構築することを視野に入れているそうです。チップデータと、3Dバイオプリンター「BIO X(バイオエックス)」を融合させれば、人工的にデジタル化された生体組織の保存・再現技術が確立しそうです。
以上、知財ハンターが注目した「NTT R&Dフォーラム Road to IOWN 2021」の展示技術でした。イベントは11月19日(金)まで開催、興味のある方はオンライン展示会場を訪れてみてはいかがでしょうか。
「NTT R&Dフォーラム Road to IOWN 2021」公式HPはこちら
参加登録はこちら(11/19 16:00まで)